Sub-bottom Profiling
Sub-bottom profiling is a technique used to study the layers of sediment and rock beneath the seafloor. It involves transmitting low-frequency sound waves into the seabed and recording the reflected signals. By analyzing the travel time and amplitude of the reflected waves, researchers can determine the thickness and composition of the sediment layers, as well as the presence of buried objects or structures. This information is crucial for understanding sedimentary processes, assessing geohazards, and locating buried archaeological sites or unexploded ordnance.
Sub-Bottom Profiling systems essentially work in a similar way to sonar, radar and other reflective positioning systems. They utilize an acoustic or seismic energy source, to trigger a pressure wave which travels down through the water column and into the seabed. By recording the reflected returns of this sound using a pressure sensitive hydrophone array, it is possible to build a picture of the subsurface structure and geology beneath the seabed.
There are a variety of different sub-bottom profiling systems available, some transmitting very high frequencies capable of identifying small geological features in the shallow part of the seabed (less then 10m below seabed) and some transmitting lower frequencies capable of identifying deeper geology and features (large features at 100m or more).
Note: Lower frequencies can identify deeper geology and features, however, there is a trade-off in 'resolution'.
High frequencies = high resolution, shallow imaging.
Low frequencies = low resolution, deep imaging.
Types of Sub-Bottom Profiler:
SBP sound sources come in four main types, each suited to different survey environments and survey objectives:
- Pinger : The highest-frequency system (operating between 2 and 20 kHz). Uses a ceramic transducer to produce and detect acoustic pulses. Produces a high-resolution image capable of resolving small features. However, it cannot penetrate very deep into the seabed (10s of meters, depending on sediment type and water depth).
- Chirp : Another high-frequency system used for high resolution, shallow penetration surveys (usually 20-50m depending on sediment type and water depth). Chirps produce a long (low frequency) pulse, made up of multiple higher frequency waveforms. This increases the overall energy that can be output by the source, improving penetration.
- Boomer : A lower-frequency system (dominant frequencies between 500 Hz and 5 kHz) capable of penetrating much further beneath the seafloor (up to 100m). Uses an induction coil and metal plate to produce acoustic pulse. Can use a single plate or a triple plate system. The combined energy output by the triple plate system is advantageous in deeper water survey settings (up to 1000m). Capable of producing high resolution data in the 10s of cm range (depending on sediment type and water depth)
- Sparker : works by producing an electrical spark, which vaporises the sea water around the tip of the sparker array. This vaporized water rapidly expands producing a pressure wave. Large very high-powered (~12,000kJ) sparkers can produce lower frequency (down to 50Hz) and penetrate down to 1000m. Smaller sparker systems are typically employed for high-resolution sub-bottom surveys. They have frequency ranges comparable to that of a boomer. These often achieve penetration in excess of 100m and resolution as good as 15cm (depending on geology and survey setting).
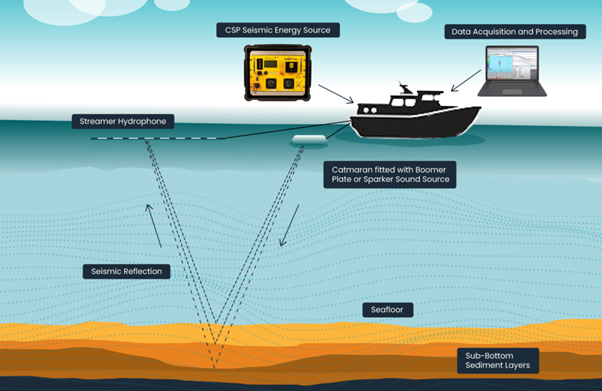
Figure 1: Schematic of Sub-bottom Profiling.
The data recorded by sub-bottom profilers can be used for many different purposes, including:
- Geohazard assessment for drilling or construction projects
- Planning geotechnical surveys
- Cable route surveys
- Imaging subsurface structures, geo-model building
- Identifying corals and marine habitats
- Environmental monitoring and management
- Offshore aggregate mining/monitoring surveys